



This project had been in limbo for far too long....
... and I actually have forgotten when I started it! All I know is that while working on this project, I was inspired to start 2 new projects with similar scorpion mode... and published those two first!

Set 31121: Crocodile I used for this project had served me well with 2 Transformers creations prior to this one (click here to view them)
ABOUT THIS PROJECT
This project was inspired by Scorponok, an official Transformers character from G1 Transformers cartoon series. So I tried to replicate the design and transformation style too.

Above: Recent official Scorponok toy based on his G1 incarnation.
Like most of my LEGO alternative creation projects that ended up in limbo ..... this one was 90% done before I put it aside for many months. Keep reading below to know why.
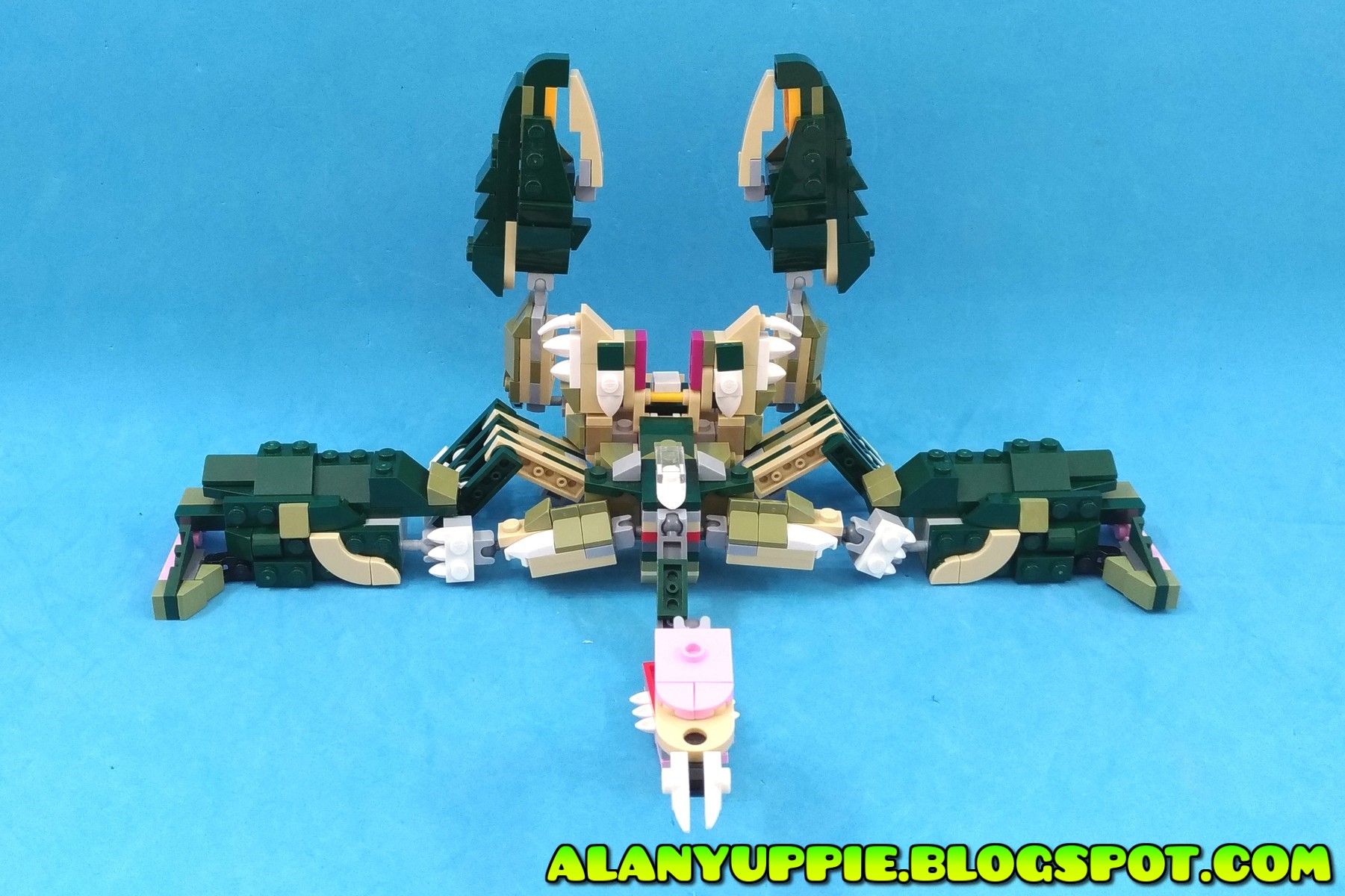
SCORPION MODE

All my LEGO Transformer built with set 31121 has been leaders of the bad guys faction aka Decepticon. Scorponok, too ... is one of them.







I just remembered one issue that bugged me ,causing me to put the project aside: The orientation of the pincer joint (robot elbow) that limited its horizontal range to about 30 degree in scorpion mode.

Lacking suitable joints to make 8 independently hinged scorpion legs, I must say I am pretty proud of the alternative methods with plates sandwiched between each another.



"BASE" MODE
The reason why I put this project in limbo was because of my inability to build a G1-like base mode for my LEGO Scorponok (with ramps running up the middle). Even after revisiting this project months later, things doesn't change much. However, let me give it a one last try in coercing my creation to form a base.


My first attempt in implementing a base mode for this creation was to design the foldable chest plates.


Hmmm...weird tail configuration. I better move on.

How about this one?





ROBOT MODE
I guess the transformation steps is not necessary for such a simple creation.




Yet another proud design choice is also related to his scorpion legs. Note how neatly they are tucked on his back, angled in such a way to hold the tail up , preventing it from sagging down.



MORE POSES
Due to his chunky upper body kibbles and also the size of his arms, this impacts his stability in elaborate knee-bending poses. Hope you appreciate my effort setting him up for the following photos!





I was pretty surprised to discover despite the heavy pincer arms, the ball joints managed to take the weight for these poses to be possible.

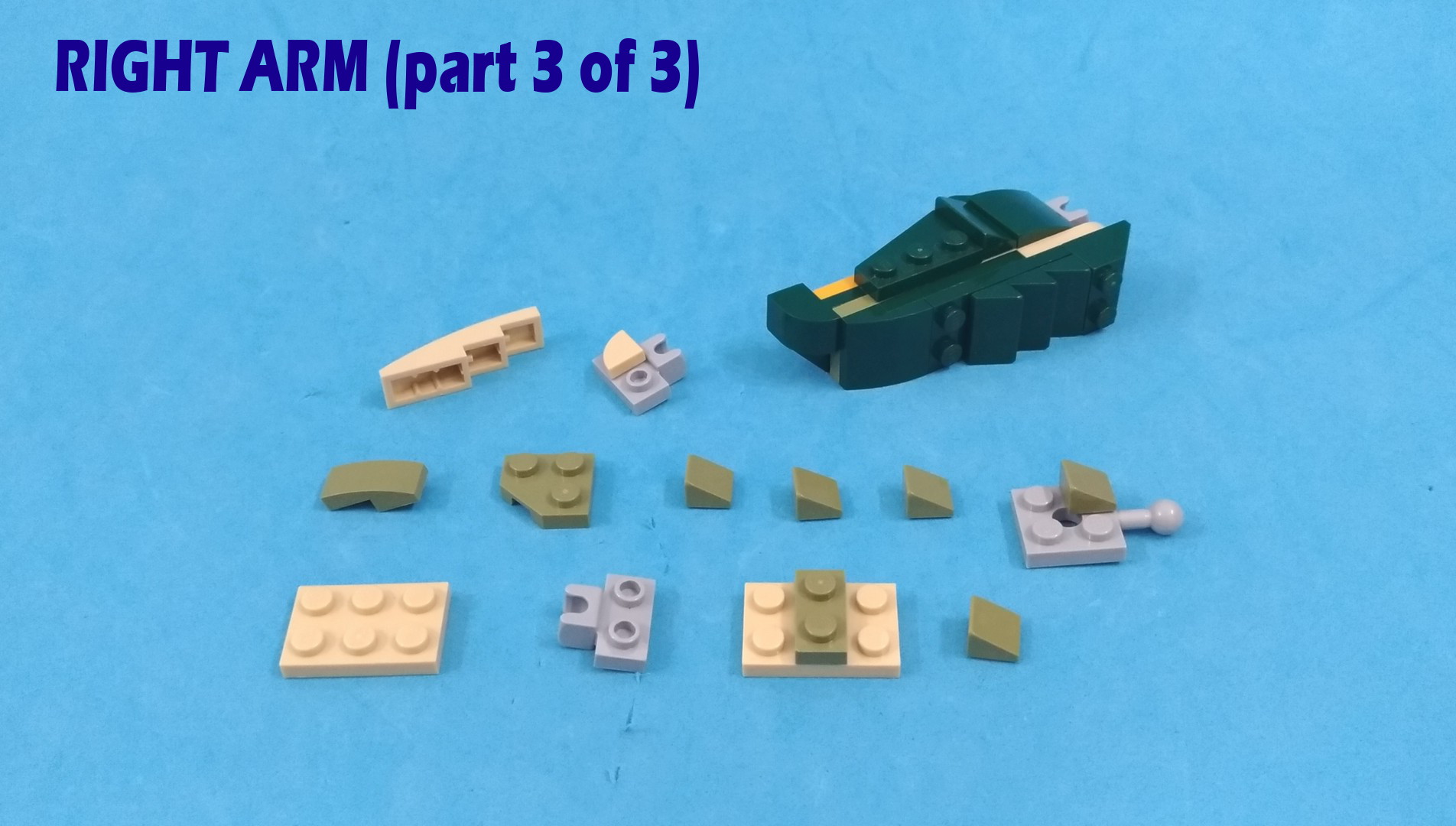
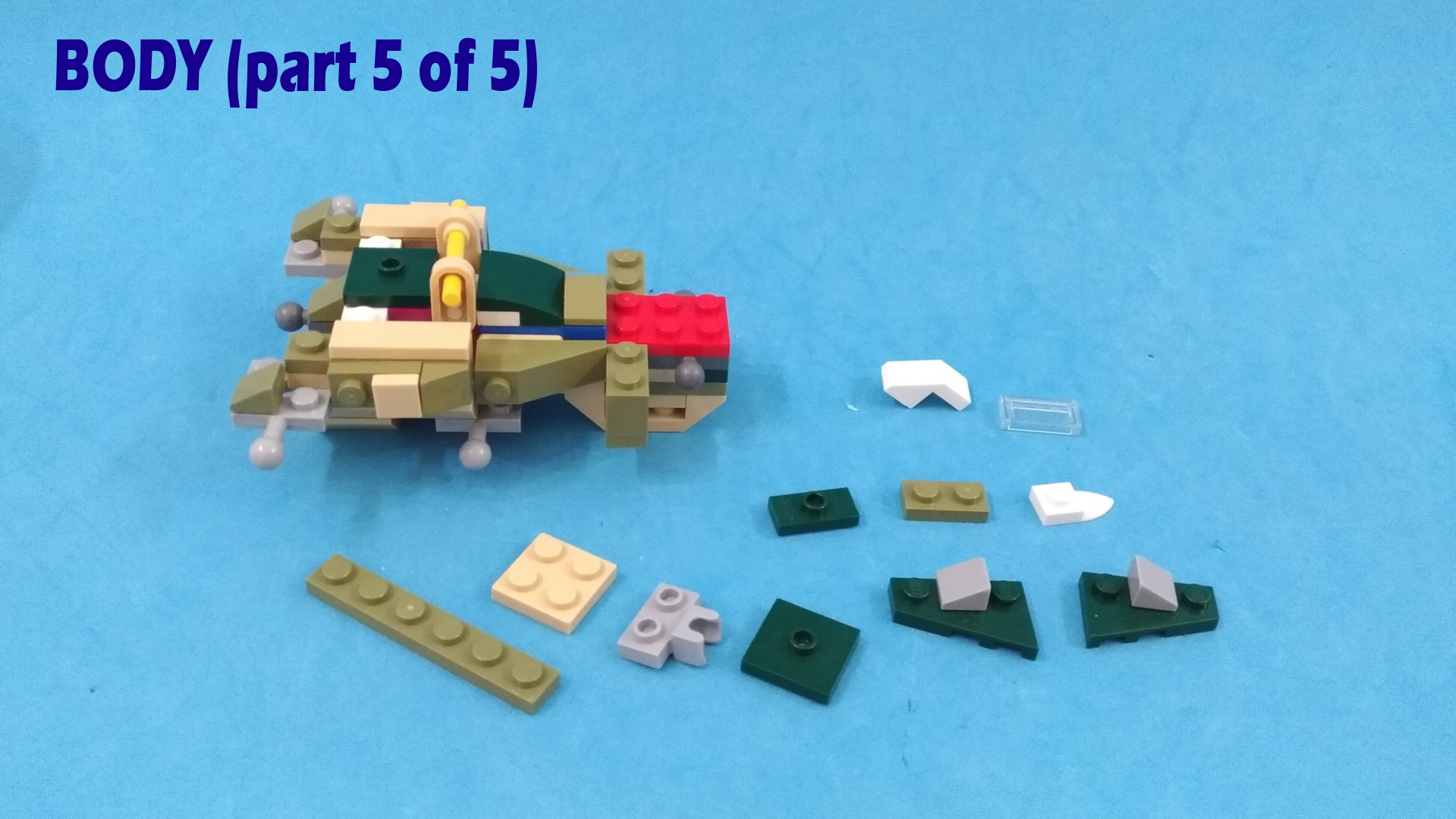
BUILDING INSTRUCTIONS
Building Instructions in the form of a video tutorial , is located at the bottom of this page.
Before you get started, please sort your parts according to the photos below.

Arms





Left Leg





Right Leg




Kibbles




Body







VIDEO TUTORIAL
Video not showing? Click here please
Thank you for following my video tutorial!
- More free building instructions using LEGO Creator 31121: Crocodile
- More free building instructions using LEGO Creator sets

No comments:
Post a Comment